Zortrax Robotic Arm
by Zortrax 21 September 2015 in Engineering
Report abuse
by Zortrax 21 September 2015 in Engineering
































New version of the Zortrax Robotic Arm.
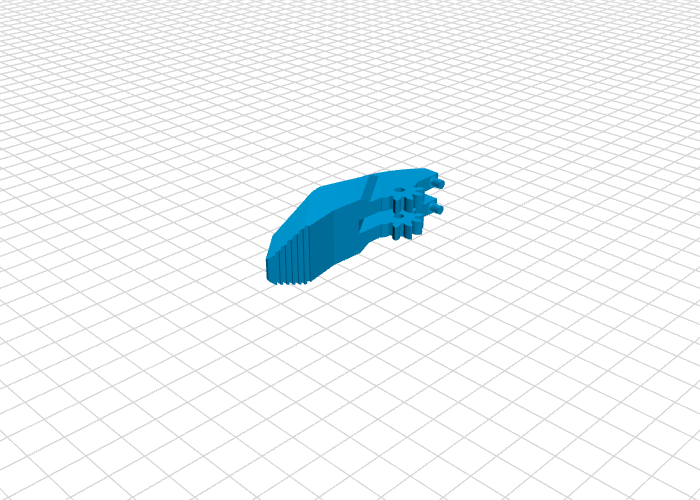
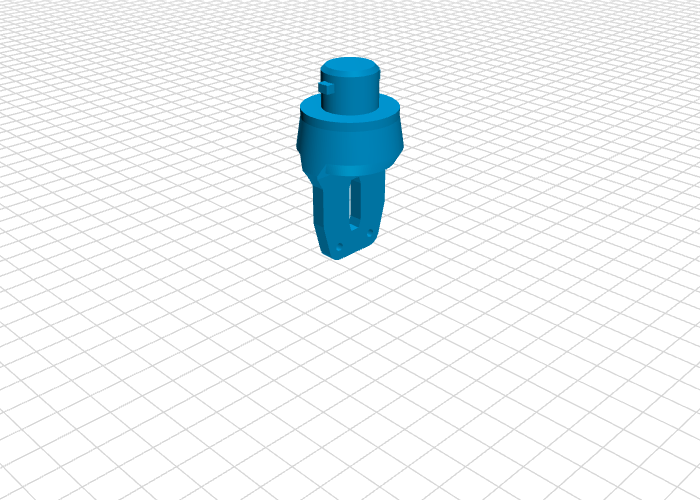
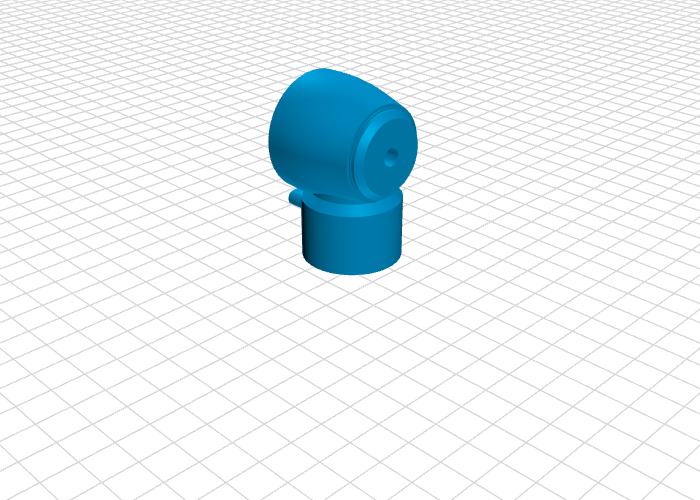
The model of Robotic Arm presented here is a pick and place device, that could be applied to the production line to advance the efficiency of the process. Thanks to the three motors used as the mechanism, the device is able to lift parts that weigh up to 0,1 kg. Five axes allow the Robotic Arm to move on five different directions and guarantee that the device will reach the parts that are to be picked. The model presented here has a mounted grasper on its end, but it can be replaced by other tips, like sucker, electromagnet or a drill, according to desired purposes.
Assembly manual can be found at: http://www.zortrax.com/downloads/ROBOTIC_MANUAL.pdf
Dancing robot.gcode file can be found at:
http://www.zortrax.com/downloads/Dancing_Robot.gcode
Use 8mm steel balls in main bearing.
We recommend to use Z-ULTRAT to print this model. To get best resoults choose 0.14 layer thickness and light infill for bigger parts. We recommend to use Side Covers during print.
| Last Update | Type | Downloads | Size | |||
|---|---|---|---|---|---|---|
|
|
Arm-1-gear.STL | 18 April 2016 |
.STL | 7668 | 113,17 KB | |
|
|
Arm-1-lower.STL | 18 April 2016 |
.STL | 7600 | 1,01 MB | |
|
|
Arm-1-upper.STL | 18 April 2016 |
.STL | 7601 | 1,47 MB | |
|
|
Arm-2.STL | 18 April 2016 |
.STL | 7599 | 1,27 MB | |
|
|
Arm-3.STL | 18 April 2016 |
.STL | 7606 | 2,03 MB | |
|
|
Base-gear.STL | 18 April 2016 |
.STL | 7594 | 123,62 KB | |
|
|
Base.STL | 18 April 2016 |
.STL | 7616 | 1,42 MB | |
|
|
Grasper-1.STL | 18 April 2016 |
.STL | 7589 | 556,63 KB | |
|
|
Grasper-2.STL | 18 April 2016 |
.STL | 7587 | 562,97 KB | |
|
|
Grasper-Body.STL | 18 April 2016 |
.STL | 7597 | 152,13 KB | |
|
|
Grasper-holder.STL | 18 April 2016 |
.STL | 7587 | 910,14 KB | |
|
|
Ring.STL | 18 April 2016 |
.STL | 7588 | 276,45 KB | |
|
|
Side-cover-arm-L.STL | 18 April 2016 |
.STL | 7581 | 78,01 KB | |
|
|
Side-cover-arm-R.STL | 18 April 2016 |
.STL | 7575 | 78,6 KB | |
|
|
Side-cover-base-L.STL | 18 April 2016 |
.STL | 7576 | 73,32 KB | |
|
|
Side-cover-base-R.STL | 18 April 2016 |
.STL | 7573 | 79,87 KB | |
|
|
Side-lid-arm-L.STL | 18 April 2016 |
.STL | 7576 | 36,61 KB | |
|
|
Side-lid-arm-R.STL | 18 April 2016 |
.STL | 7583 | 48,32 KB | |
|
|
Small-gear.stl | 18 April 2016 |
.stl | 7590 | 2 MB | |
|
|
Support.STL | 18 April 2016 |
.STL | 7612 | 2,05 MB | |
|
|
Toothed-ring.STL | 18 April 2016 |
.STL | 7594 | 1,01 MB | |
|
|
Vertical-axis-gear.STL | 18 April 2016 |
.STL | 7607 | 61,41 KB | |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
54 Comments
You must be logged in to post a comment.
You must be logged in to post a comment.
HI,
This link doesn’t work anymore
Can you send a link with the RAMPS Marlin firmware?
Would it be possible to print this on the Inkspire 2? What would be the recommended resin?
How many pounds of filament was removed in the 3d printing process of the hello robot
Does anyone know where i can find the hardware parts to buy them?
Does anyone know where i can find the hardware parts to buy them?
thanks!
Universal glass plate holder
by ZortraxMaterial Endstop Cover
by ZortraxM300 Dual Fan Shroud
by ZortraxSpool drawer
by ZortraxFace Masks Assembly Ear Loops Module
by ZortraxFace Masks Assembly Fabric Module
by ZortraxAdd this project to collection